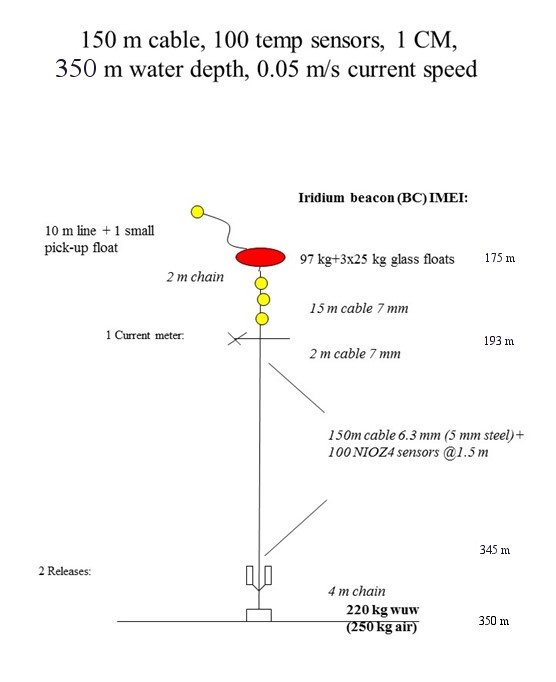
low-drag moorings: thin mooring lines
 As it is presently technically too difficult to follow a water particle and register its movements as a function of time in the Lagrangean way, the only other proper way to study ocean dynamics is using instrumentation that register the flow going past them in the Eulerian way.
As it is presently technically too difficult to follow a water particle and register its movements as a function of time in the Lagrangean way, the only other proper way to study ocean dynamics is using instrumentation that register the flow going past them in the Eulerian way.
Perfect Eulerian moorings completely fix instruments in space under water. However, as the general aspect ratio of large-scale ocean currents is 1:1000, or perhaps 1:100, the flow and the associated drag force by any object obstructing the flow are nearly perpendicular to the direction of gravity. A balance of forces is thus impossible and the mooring will be deflected by any non-zero flow. The aim of mooring design is to minimize this ‘mooring motion’, as it differs from the pure Eulerian concept of measuring flow at a position fixed in space. We impose the criterion of a maximally tight, minimally moving mooring so that the vertical deflection may never exceed half the distance between any of the instruments along the mooring line. This requires a balance between (net) buoyancy, bottom weight, cable thickness and cable strength. The design is verified for given (maximum) current speed using the ‘mooring dynamics’ software developed by Richard Dewey of University of Victoria, Canada.
thermistor string drum
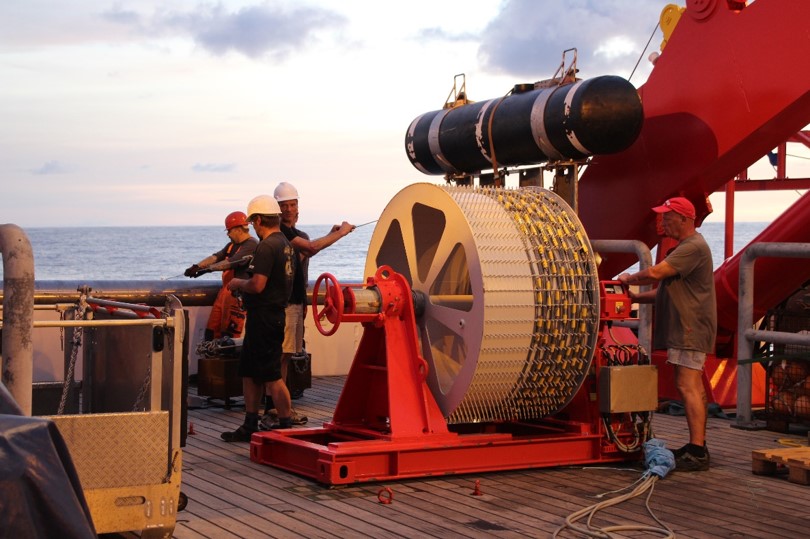 The deployment of a 1D mooring of temperature ‘T-‘sensors, a thermistor string ‘T-string’, is similar to most commonly done for ‘standard’ oceanographic moorings. Through the ship’s aft A-frame the top-buoy is put first in the water whilst the ship is slowly steaming forward. The T-string is coupled between buoy/other instrument(s) and other instrument(s)/acoustic releases before attaching the weight that is dropped in free fall. The T-string is put overboard through a wide, relatively large diameter (>0.4 m) pulley, about 2 m above deck, or, preferably, via a smooth rounded gunwhale (photo). Up to 100 m length of T-string holding typically 100 sensors can be put overboard manually by one or two people. In that case, the string is laid on deck in neat long loops and the entire mooring is interconnected prior to deployment. The deployment of a longer length T-string becomes more difficult, because of the weight and drag. For such strings a 1.48 m inner diameter (1.60 m OD) 1400 pinnacles drum is constructed to safely and fully controllable deploy them. The drum’s dimensions fit in a sea container for easy transportation. The 0.04 m high metal pinnacles guide the cables and separate them from the temperature sensors in ‘lanes’, while allowing the cables to switch between lanes. The pinnacles are screwed and welded in rows 0.023 and 0.027 m apart, the latter sufficiently wide to hold the sensors (with cable). Up to 18 T-sensors can be located in one lane, before the next lane is filled. The drum has 14 double lanes and can hold about 240 T-sensors and 450 m of cable in one layer. However, longer T-strings have been deployed successfully by doubling part of the string on the drum. For example, for a mooring in the Challenger Deep of the Mariana Trench a 600 m long cable held 300 T-sensors, with about one-quarter of the T-string doubled on the drum. The doubling did not pose a problem, the sensors were thus well separated that entanglement did not occur. For recovery, or deployment of strings holding up to 150 T-sensors, a smooth surface drum is used of the same dimensions but without pinnacles.
The deployment of a 1D mooring of temperature ‘T-‘sensors, a thermistor string ‘T-string’, is similar to most commonly done for ‘standard’ oceanographic moorings. Through the ship’s aft A-frame the top-buoy is put first in the water whilst the ship is slowly steaming forward. The T-string is coupled between buoy/other instrument(s) and other instrument(s)/acoustic releases before attaching the weight that is dropped in free fall. The T-string is put overboard through a wide, relatively large diameter (>0.4 m) pulley, about 2 m above deck, or, preferably, via a smooth rounded gunwhale (photo). Up to 100 m length of T-string holding typically 100 sensors can be put overboard manually by one or two people. In that case, the string is laid on deck in neat long loops and the entire mooring is interconnected prior to deployment. The deployment of a longer length T-string becomes more difficult, because of the weight and drag. For such strings a 1.48 m inner diameter (1.60 m OD) 1400 pinnacles drum is constructed to safely and fully controllable deploy them. The drum’s dimensions fit in a sea container for easy transportation. The 0.04 m high metal pinnacles guide the cables and separate them from the temperature sensors in ‘lanes’, while allowing the cables to switch between lanes. The pinnacles are screwed and welded in rows 0.023 and 0.027 m apart, the latter sufficiently wide to hold the sensors (with cable). Up to 18 T-sensors can be located in one lane, before the next lane is filled. The drum has 14 double lanes and can hold about 240 T-sensors and 450 m of cable in one layer. However, longer T-strings have been deployed successfully by doubling part of the string on the drum. For example, for a mooring in the Challenger Deep of the Mariana Trench a 600 m long cable held 300 T-sensors, with about one-quarter of the T-string doubled on the drum. The doubling did not pose a problem, the sensors were thus well separated that entanglement did not occur. For recovery, or deployment of strings holding up to 150 T-sensors, a smooth surface drum is used of the same dimensions but without pinnacles.
A 1200 m long temperature sensor string
The longest T-sensor string deployed thus far held 760 sensors at 1.5 m separation. It was distributed over two cables of 600 m length. The T-sensors were synchronised to a single standard clock that was mounted between the two cables. For deployment, two pinnacle drums were used of which the filling T-strings were nearly completely doubled. The two T-string sections, and drums, were interconnected with a single short-cut wire to maintain the synchronization after T-sensor start and prior to deployment. (video of deployment above Mount Josephine, NE-Atlantic Ocean).
Self-unrolling moorings incl. a Neutrino telescope launcher
When T-strings are held on a drum, they are still spooled into the water in a winch-controlled manner. A different and faster way of deploying a mooring into the ocean is via ‘self-unrolling’. This can be done at the surface by putting over the side a compact mooring roll up on the (top-)buoy and releasing the weight. Alternatively, one can lower a compacted mooring to the seabed and release the buoy. A slightly different version is to compact the mooring in a buoyant vehicle which, upon its ascent to the surface, releases different mooring element all attached to the mooring cable(s) along which it rolls upwards. After releasing the mooring top-buoy the still buoyant vehicle surfaces for re-use. Such vehicle and mooring launch design have been developed at NIOZ to put vertical mooring lines ‘strings’ of unprotected glass spheres holding sensitive optical sensors in the deep sea at fixed (to within 1 m precise) horizontal positions to constitute an underwater neutrino telescope. The telescope is used by astrophysicists and oceanographers alike. (video of first successful launch Bol-tewaterlating+omrollen-nomale-snelheid)
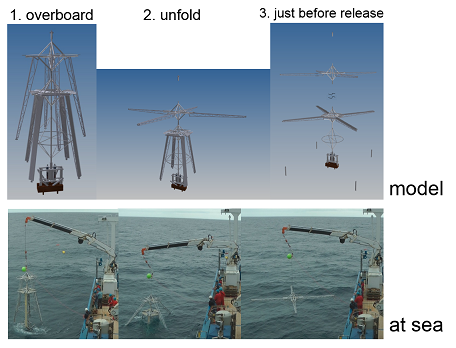
3D-five lines thermistor string mooring
In free fall, multiple mooring lines cannot be more precisely launched than to within 100 m horizontal distance (at a given water depth of about 3000 m, and given some knowledge of local currents during deployment). More precise positioning requires the lowering of the mooring all the way to the bottom. However, even a compacted mooring cannot be placed closer to its neighbors than about 10% of its length, say 10 m for 100 m long mooring lines. Otherwise they risk to become entangled by variable currents. In order to study small-scale turbulence development in three dimensions, a single compacted five-line 3D mooring was developed. This NIOZ-development consists of 5 mooring lines, 100 m long, 4 (and 5.6) m apart horizontally and can hold up to 530 temperature sensors. It is transported in a 20 foot sea container. In compacted form it is 6 m tall, weighing about 2 tonnes. It is put overboard as a single free-fall mooring, by first putting buoys and single mooring line overboard. After putting the compacted structure overboard, it is unfolded by lowering the central weight while still hanging in the crane. Once under tension of about 150 kg (1500 N) per line by the full weight, it is released in free fall and the buoys take over the tension, of about 100 kg per line (500 kg in total). This tension is sufficient to prevent the structure from torqueing, under currents with speeds up to 0.4 m/s. (Reference/publication)
(video of photo-impression deployment November 2017; video of deployment)

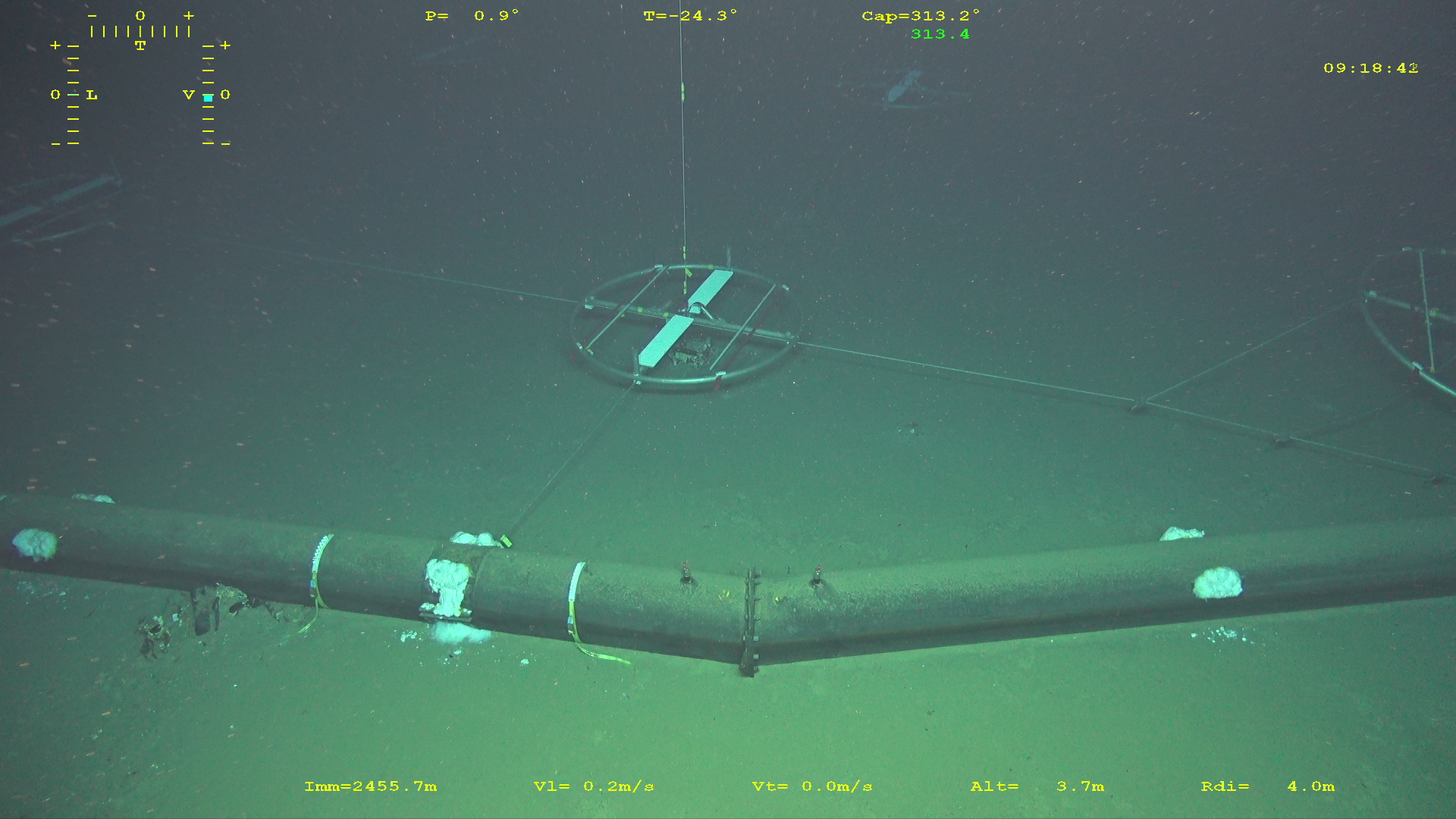
3D-T: Half a cubic hectometer mooring array holding 3000 T-sensors
A large single mooring operation was successfully launched in October 2020 to deploy 45 mooring lines 125 m long holding a total of 3000 high-precision T-sensors. A 70-m diameter large ring of 18 steel tubes of 12 m length was stiffened by a network of steel cables 9.5 m apart. At the intersections of the steel cables 2.5-m-diameter aluminum small rings were mounted. The 125 m long vertical mooring lines were folded upon each of the small rings and held under their top-buoys. The top-buoys were released chemically after 5 days in sea. With air filled in the large-ring steel tubes, the ensemble floated and could be towed to the mooring site. At sea, at the site valves were opened manually and the steel tubes filled with seawater. After going underwater, the sinking was controlled by a custom-designed parachute for flat-horizontal landing of the large ring.
The operation is to gain insight in the three-dimensional development of breaking underwater waves and turbulence for the distribution of substances in the deep sea. The unique mooring array fills a half cubic hectometer (half a billion liters) of seawater volume. For about 3 years, it will remain at the foot of the southern France continental slope of the West-Mediterranean Sea, an area known for various currents and eddies. The location is next to the underwater neutrino telescope, part of the large-scale infrastructure project KM3NeT. (Reference/publication)
 Test-phase of large ring guarded by Texel sheep. Video by Hung-An Tian
Test-phase of large ring guarded by Texel sheep. Video by Hung-An Tian


Right: at sea just before deployment a/b R/V Pelagia. 
Video of the final stage of deployment just before sinking can be found here.
Below: underwater images from ROV Victor a/b R/V Pourquoi pas ?